
Da poco disponibile un aggiornamento per CloudCompare. Disponibile infatti CloudCompare 2.6.2, versione molto attesa che viene rilasciata ben quasi otto mesi dopo la 2.6.1. Versione però che porta 3 nuovi plugin, diversi nuovi metodi ed un sacco di miglioramenti.
Vediamo nel dettaglio le novità che CloudCompare 2.6.2 introduce rispetto alla versione precedente. Le nuove funzionalità di questa versione sono:
Per cominciare ora le registrazioni in CloudCompare saranno molto più accurate, perché calcola la nuvola reale e la distanza delle maglie se il riferimento è la maglia. Le ICP sono ora ponderata e funzionali, con i pesi normalizzati automaticamente e che considerano solo i valori assoluti.
CloudCompare 2.6.2 su Windows a 64 bit
- Nuova modalità “Stereo” per il rendering anaglyph-like vedi il wiki. Modalità che deve essere utilizzato con il rosso – blu o il rosso – ciano, funziona solo in modalità prospettica, gli shader (qEDL, qSSAO) non sono supportate in modalità stereo. Funzione supportata anche dal visualizzatore CCViewer. Scorciatoia da tastiera F10;
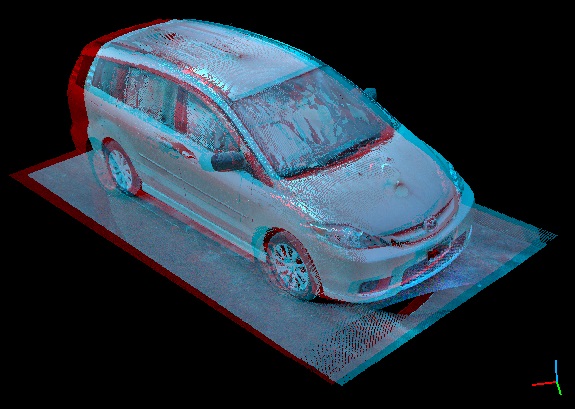
modalità ‘Stereo’
- Nuovo plugin qAnimation (iniziato da 2G Robotics) – vedere wiki. Plugin che permette il rendering di animazione ed è in grado di creare file video (MPEG, H232, ecc – a seconda delle codec installati). Video sotto;
- Nuovo plugin qFacet (creato da BRGM) – vedi wiki. Crea delle sfaccettature automatici planari (ad esempio piani di frattura). Classificazione basata sull’orientamento, stereogramma, esportazione in SHP e file CSV;
- Nuovo plugin qGMMReg. Permette la registrazione non rigida della nuvola di punti (o mesh). Basato sulla libreria GMMReg e destinato ad essere utilizzato su entità piccole (qualche migliaio di punti);
- Con Gridded/structured clouds handling, CloudCompare ora ricorda la struttura a griglia delle nuvole (PTX, DP, FARO, etc.). Vedere la nuova sezione “grid Scan“;
- Nuova finestra di dialogo Brand “Normal Computation“, vedere il wiki;
- Nuovo metodo “Edit > Sensor > TLS/GBL > Compute points visibility” vedere il wiki. Se un sensore TLS/GBL viene selezionato con questo metodo l’utente può selezionare qualsiasi nuvola di punti e CC classificherà suoi punti in termini di “visibilità” relativamente al sensore selezionato;
- Nuova opzione nel menu contestuale della struttura DB (tasto destro del mouse su un elemento);
- Nuovi collegamenti per le viste 3D, Zoom in (+) e Zoom out (=);
Poi ci sono delle caratteristiche avanzate che sono:
- Strumento Rasterizza – vedi aggiornamento wiki;
- Filtro SOR – vedi aggiornamento wiki;
- Poisson ricostruzione Superficie, ora utilizza la versione 7 della biblioteca PoissonRecon, interpolazione del colore più veloce e pulito;
- Display:
- CloudCompare ora supporta il “Level Of Detail” (LoD) visualizzazione per grandi nuvole;
- se abilitato, le nuvole vengono ora visualizzati per primi a un livello octree basso in caso di spostamento e vengono poi regolarmente raffinati quando l’utente non interagisce con loro;
- l’utente può ora specificare il numero minimo di punti e il numero minimo di triangoli necessari per attivare LoD display / decimated display;
- Segmentazione:
- da Edit > Crop’ and ‘Tools > Segmentation > Cross Section gli strumenti possono ora essere applicati su maglie triangolari;
- Inoltre, il taglio applicato è pulito;
- Histogram dialog: nuova icona “Export to CSV” e “Export to image“;
- Aggiunte nuove scorciatoie da Riga di comando. Per vederle tutte comprese le ultime aggiunte questo il link Command line mode..
- Aggiornato leggermente e semplificata la “Distances computation tool“. Per le viste 3D ora riconosce il “pizzicare” con le dita per gli schermi multi-touch (solo funzioni zoom avanti e indietro);
- Ora è possibile aprire i file PLY con più di una trama;
- Per i file ASCII ora s può impostare la precisione di uscita a 12 invece che a 8;
- e molti altri aggiornamenti che possiamo vedere alle note di rilascio.
Corretti anche un buon numero di bug. In questa versione poi si è passati per una migliore stabilità alla versione 4.8 (abbandonato per il momento il troppo giovane QT 5.4) del framework Qt.
Per scaricare l’ultima versione disponibile questo il sito CloudCompare da cui alla pagina download possiamo scaricare le ultime versione per l’OS Windows a 32 e 64 bit, sia la versione installer che la versione archivio. Per Linux si rimanda a un sito dove troviamo pacchettizzato in un unico file .DEB, aggiornabile anche da PPA grazie al lavoro di Romain Janvier (ad oggi la versione disponibile è ancora la 2.6.0). Stesso discorso fatto per l’OS Linux vale per Mac OS X (l’attuale versione funziona sulle versioni di OS X dalla 10.8 e successive) anche qui è presente un unico file pacchettizzato in .dmg grazie al lavoro in questo caso di Andy Maloney. Per il download anche dalla pagina principale del progetto saremo indirizzati al sito QUI.
Dato che CloudCompare è un software Open Source da github si possono scaricare i sorgenti.
Ricordo sempre che se originariamente CloudCompare è stato progettato per eseguire il confronto tra due nuvole di punti 3D o tra una nuvola di punti ed una maglia triangolare. Oggi è molto cresciuto forse di più di quando si pensava.
Dispone ora di molti algoritmi avanzati che permettono al software di fare il ricampionamento, la registrazione, colore, calcolo delle normali, ecc.
CloudCompare è un software Open Source e multi-piattaforma capace di aprire e salvare in diversi formati, come BIN, ASCII, PLY, OBJ, VTK, LAS, E57, OUT, PCD, SOI, PN, PV, ICM, mentre permette il salvataggio per le nuvole di punti in BIN, ASCII, PLY, LAS, E57, VTK, PN, PV, PCD mentre per le mesh in OBJ, PLY, VTK, MAYA (ASCII).