
Disponibile un nuovo aggiornamento e aumento di versione per CloudCompare, il software Open Source per l’elaborazione delle nuvole di punti e delle mesh originariamente progettato per eseguire il confronto tra due nuvole di punti 3D o tra una nuvola di punti ed una maglia triangolare ed oggi invece un software completo e multi – piattaforma.
In data 18 dicembre 2016 è stato rilasciato CloudCompare 2.8.0 “Hogfather” per la prima volta si presenta con un soprannome dato alla versione.
Come sempre la versione appena rilasciata apporta diverse nuove funzionalità e diversi nuovi plugin (qVirtualBroom per pulire le scansioni stradali, qCSF per l’estrazione della nuvola a terra, qHoughNormals per il calcolo delle normale, e le fonti M3C2 sono ora pubbliche), supporto migliorato per i display Retina, e molti altri miglioramenti della versione Mac OS (grazie a Andy Maloney che poi è la persona che prepara i pacchetti appunto per OS X). Aggiunti nuovi metodi di creazione (advanced plane creation, structured cloud meshing, etc.), nuovi formati supportati (Riegl RDBX, Photoscan PSZ, etc.) e molti altri miglioramenti e correzioni di bug.
Più nello specifico le nuove caratteristiche di CloudCompare 2.8.0 “Hogfather” rispetto alla precedente sono:
- Nuovo plugin: qBroom (Virtual Broom “disponibile al momento solo per Windows e Mac OS”). Questo plugin ha lo scopo di pulire in modo efficiente le scansioni stradali. questo grazie ad una selezione intelligente e interattiva dei punti posizionati su di una superficie piatta come appunto una strada. Con selezione dei punti all’interno del “broom”, sopra, sotto o in entrambi i casi. Possibilità di invertire la selezione e modalità di automazione. (Thanks to Wesley Grimes of Collision Engineering Associates, Inc. for this great contribution!);
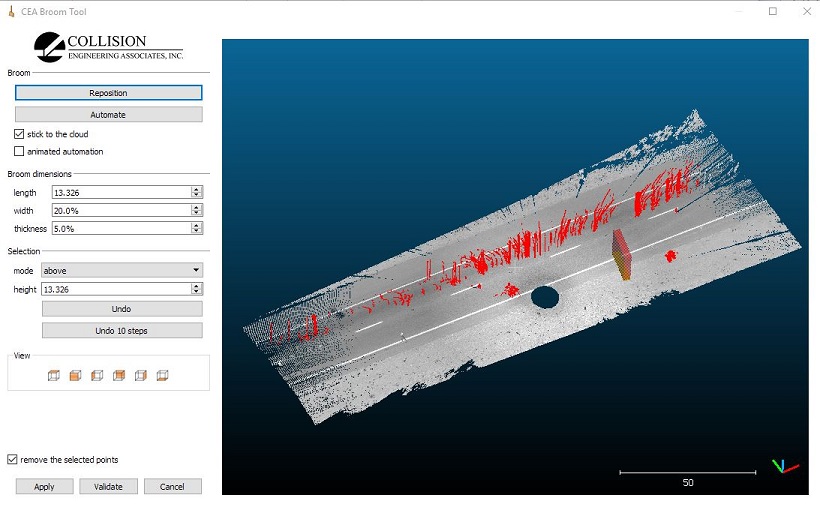
qVirtualBroom
- Nuovo plugin: qCSF (Cloth Simulation Filtering “disponibile al momento solo per Windows e Mac OS”). Automatic ground / non-ground classification of aerial LIDAR point clouds. Sulla base dell’articolo: “An Easy-to-Use Airborne LIDAR Data Filtering Method Based on Cloth Simulation”, Qi Jianbo, Wan Peng, 2015;
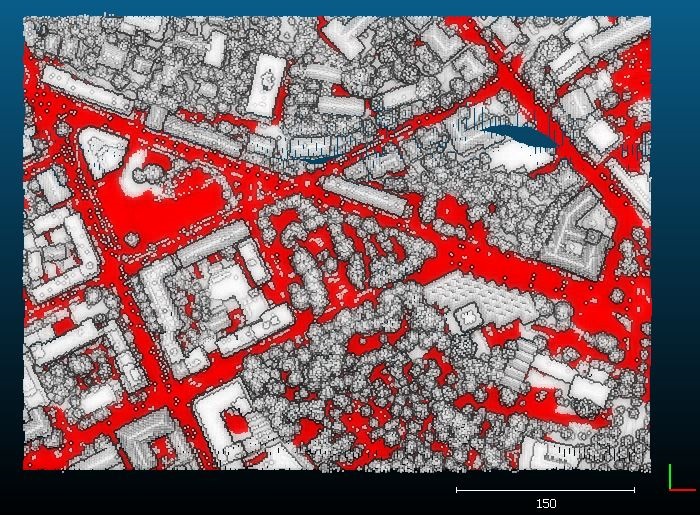
cc_qCSF
- Nuovo plugin: qHoughNormals (Normal Estimation in Unstructured Point Clouds). Sulla base di “Deep Learning for Robust Normal Estimation in Unstructured Point Clouds” by Alexandre Boulch and Renaud Marlet, Symposium of Geometry Processing 2016, Computer Graphics Forum;
- qM3C2 sources sono ora pubbliche ed il plugin è ora disponibile per tutte le piattaforma;
- Supporto per FWF (Full WaveForm) e airborne LIDAR data (solo pe Windows). Possibile utilizzare il filtro dati LAS 1.3 o 1.4 (.las, .laz). Nuovo strumento in “Edit > Waveform > 2D Waveform viewer” per visualizzare le forme associate a ciascun punto (come le curve 2D). Possibile esportare in un file CSV;
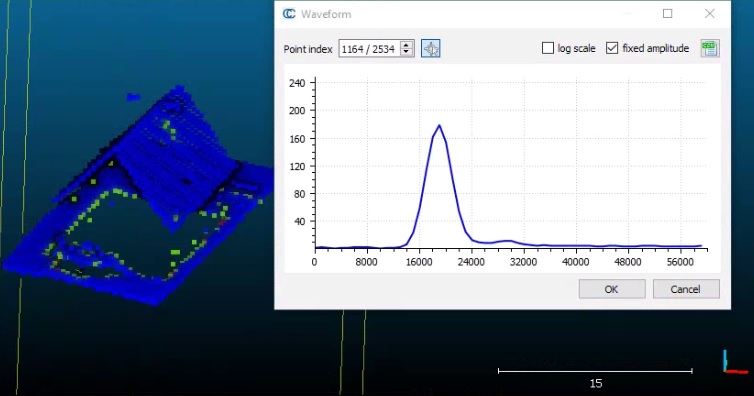
cc waveform viewer
- Nuovo metodo “Geological” plane creation / edition methods:
- Edit > Plane > Create: consente di creare un piano con specifica direzione / centrom larghezza e altezza;
- Edit > Plane > Edit: modificare i parametri di cui sopra su un’entità piano esistente;
(Grazie a SAGE Ingéniérie per questo grande contributo!);
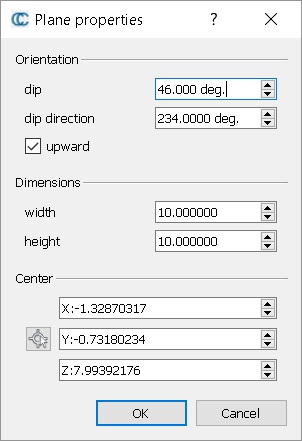
cc plane creation
- Nuovo strumento: “Edit > Mesh > Create surface between two polylines“, crea una patch di superficie tra due polilinee. (Grazie a SAGE Ingéniérie per questo grande contributo!);
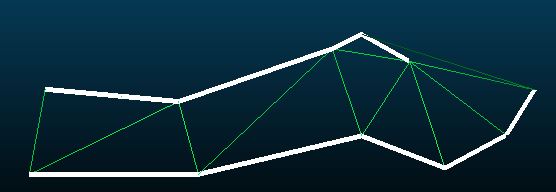
cc mesh2 polylines
Nuovo strumento: “Edit > Mesh > Mesh scan grids“, crea una superficie da una nuvola con una o più griglie di scansione. Produce una maglia per ogni griglia;
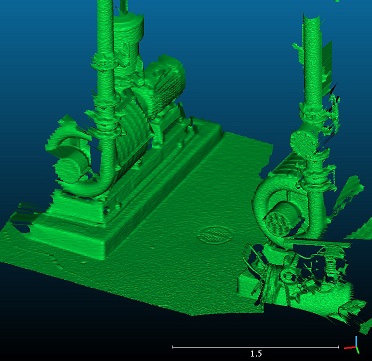
cc mesh scan grids
- Nuovo strumento: “Edit > Color > Enhance with intensities“. esalta i colori RGB grazie al campo intensità scalare (metodo RGB-IHS);
- Ora supporta il Gamepad (Xbox, etc.) [solo Windows];
- Disponibile nuove scale di colore: due colorscales per la visualizzazione tuffo e direzione di immersione, matplotlib’s veridis colormap (perceptually-uniform;
- Aggiunto al menù la voce “Open Recent” per accedere rapidamente gli ultimi 10 file;
- Nuova opzione “display” per disegnare punti tondi invece di quelli quadrati (quando la dimensione in punti> 1 (può rallentare il software);
- Nuovi formati supportati:
- Nuovo formato poligonale: Profilo altimetrico 2D (curvilineo ascissa + Z coordinate);
- Photoscan PSZ;
- Riegl RDBX (solo Windows);
- Poi c’è una lunga lista di miglioramenti:
- Migliramenti per il plugin di Animazione, Poisson Reconstruction plugin, Cross-section tool, DB Tree, Facets plugin;
- Nuove scorciatoie “a la Meshlab”;
- Etichette 2D: Supporta la maggior parte delle etichette 2D;
- SHP files: durante il caricamento di punti 2D, la coordinata Z può ora essere esportati da un campo DBF associato;
- Caricamento del file: quando uno o più file vengono caricati, annullando il processo di caricamento di un file si fermerà l’intera procedura di caricamento;
- Per i file LAS / LAZ: viene mostrato la finestra di dialogo riorganizzato, le informazioni sul file vengono ora visualizzati in una scheda “Info”. Nuova opzione “Tiling”;
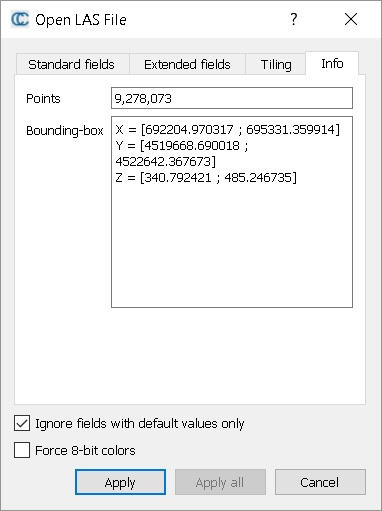
cc las info
- Global Shift & Scale: il plugin PoissonRecon ora trasferisce il Cambiamento Globale e informazioni della Scala dalla nuvola alla maglia risultante;
- 2.5D Volume Calculation tool: nuova opzione per esportare la griglia di differenza di altezza come una nuvola (attenzione: l’altezza punti esportato sarà effettivamente uguale alla differenza di altezza). La scala di colori di default è ora simmetrica se le differenze di altezza non sono solo positivo o solo negativo;
- Strumento Rasterize;
- Raster file import, con una nuova opzione per importare il raster come un quad texture (mesh). Disponibile solo se la griglia ha almeno R, G e B bande. CC è ora in grado di caricare correttamente i file raster con più bande indefinite;
- Tutte le linee selezionate della console possono ora essere copiati in una sola volta (ad esempio con CTRL + C su Windows);
- Connected Components Extraction: safeguard added if too many components are to be created;
- CC dovrebbe avvisare l’utente quando si tenta di salvare un file con un nome che contiene caratteri speciali quando la libreria di terze parti è responsabile dell’esportazione e questi caratteri non sono supportati (vedi il messaggio di avvertimento Console);
- Opzioni di visualizzazione;
- Apply Transformation tool;
- Normals computation;
- Ed altre modifiche minore e naturalmente la correzione di un gran numero di bug.
Per vedere la lista completa di tutte le modifiche di CloudCompare 2.8.0 “Hogfather” questo il link che rimanda alle note di release.
Per scaricare l’ultima versione disponibile questo il sito CloudCompare da cui alla pagina download possiamo scaricare le ultime versione per l’OS Windows a 32 e 64 bit, sia la versione installer che la versione archivio (la sola versione a 64 bit è una versione Stereo). Le vecchie schede grafiche non sonno più supportate, per queste bisogna scaricare la versione 2.6.3 Beta.
Versione aggiornata all’ultima disponibile anche per Mac OS X. Mantenuta sempre da Andy Maloney e richiede MacOS X 10.10+ (64-bit Intel) Per OSX 10.9 bisogna utilizzare la versione 2.6.1. Per il download anche dalla pagina principale del progetto saremo indirizzati al sito QUI.
Per Linux l’ultimo aggiornamento disponibile pacchettizzato in .deb è il PPA aggiornato da Romain Janvier su Bintray. Disponibile al momento ancora la versione 2.6.3 per Trusty 14.04, Wily 15.10 e addirittura Ubuntu xenial 16.04 in versioni per i386 e amd64.
L’installazione del software su OS Linux e Mac OS X (a differenza di Windows), installa sia il software CloudCompare che il visualizzatore ccViewer.
Dato che CloudCompare è un software Open Source da github si possono scaricare i sorgenti.
CloudCompare dispone ora di molti algoritmi avanzati che permettono al software di fare il ricampionamento, la registrazione, colore, calcolo delle normali, ecc.
CloudCompare è un software Open Source e multi-piattaforma capace di aprire e salvare in diversi formati, come BIN,ASCII, PLY, OBJ, VTK,LAS,E57, OUT, PCD, SOI, PN, PV, ICM, mentre permette il salvataggio per le nuvole di punti in BIN, ASCII, PLY, LAS,E57, VTK, PN, PV, PCD mentre per le mesh in OBJ, PLY, VTK, MAYA(ASCII).